
This is the large aproach to the stuff !!
Unfortunatly since i have a girlfreind - no time is left for playing with robots so only parts could be designed and implemented yet.
This ist the view on its mechanics - everithing learnd from BugRug1 was used to make mechanics as simple as possible.
At least he's got a hat now ;-) !

The servos got some speed control l now.
The heart of the bot is the controller - a 80C535 Siemens 8051 compatibel unit.
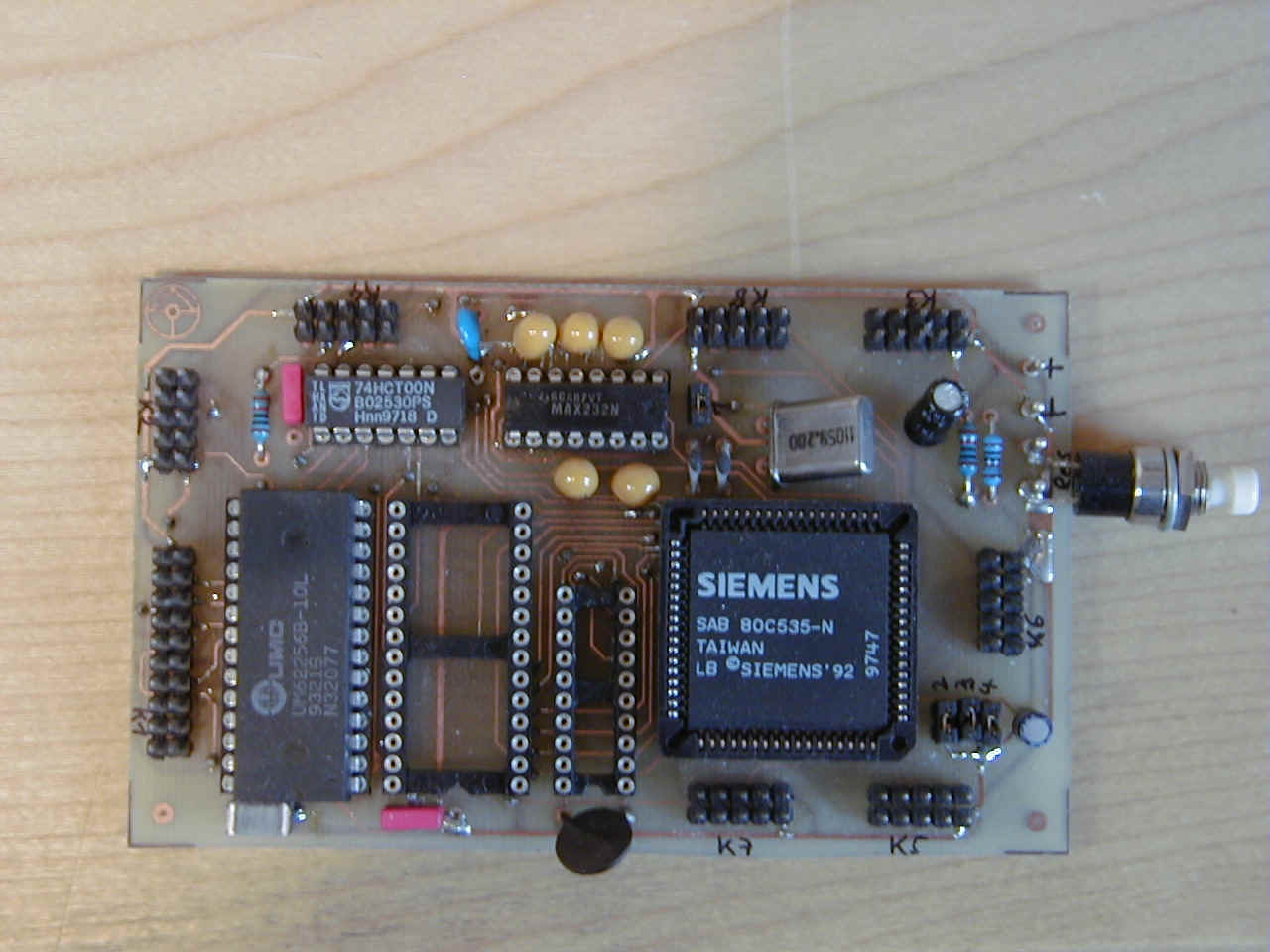
Programmed with a great Monitor Eprom (Paulmon2 ).
Programming is done in C - get the free C-Compiler here (many thanks to Sandeep for it !)
The 80C353 Hardware was derived from a circuit out of the book "Einplatinencomputer" from "Elektor Verlag".
At the moment i am woking on a radio-datalink between the PC and the 80c535 MC. Let's see...
|
Plans for the future:
|
 |