The reflection sensor is a simple circuit registering every change in front of his "eye" and generating a puls on the output line.
The servos and the electronics can be simple supplied with 5V DC Power of the Robot's power supply.
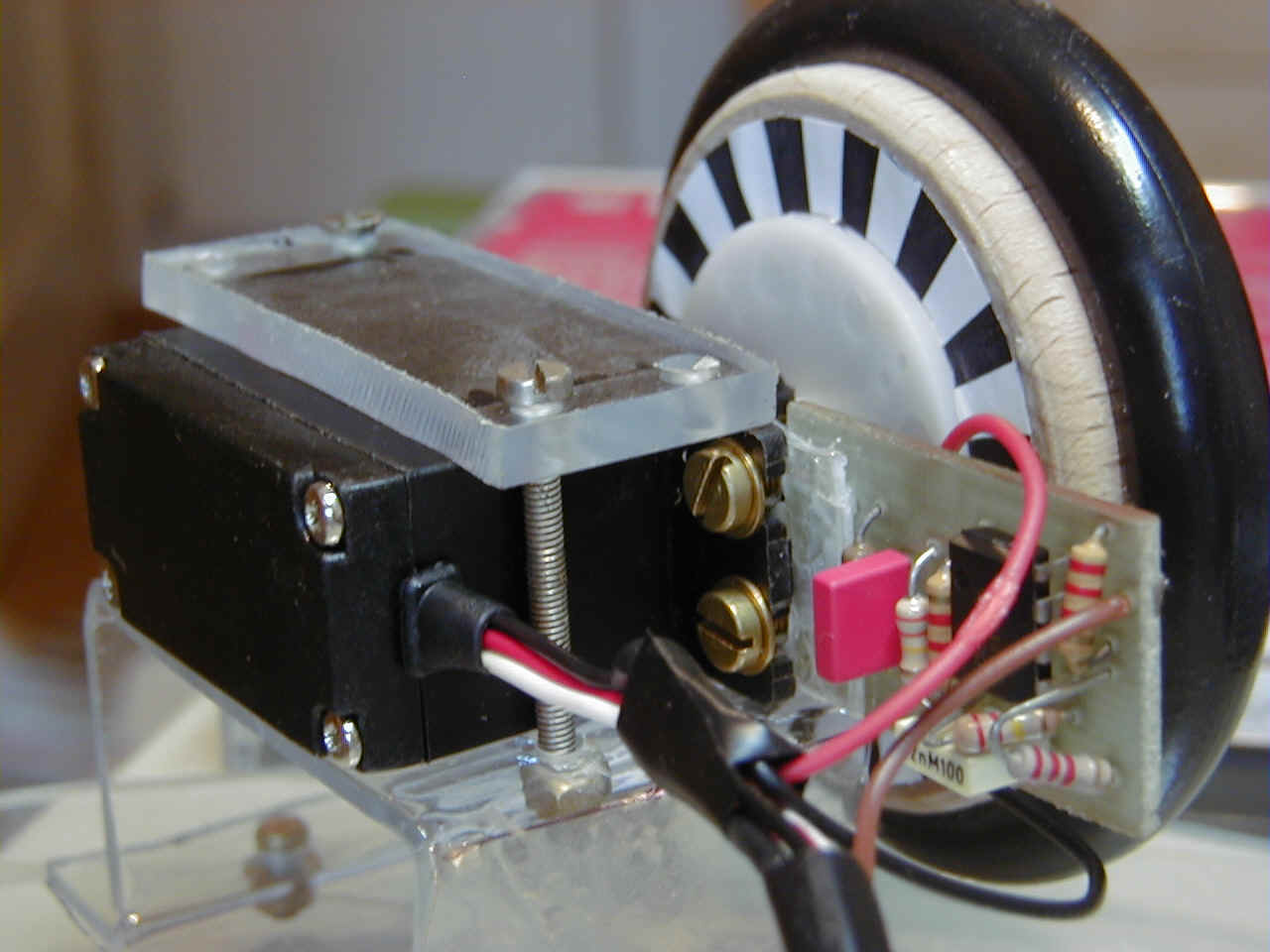
The sensor circuit is directly mounted to the servo, so it is not sensitive to shocks.
The circuit is a simple comparator, using a Dual-Op-Amp.
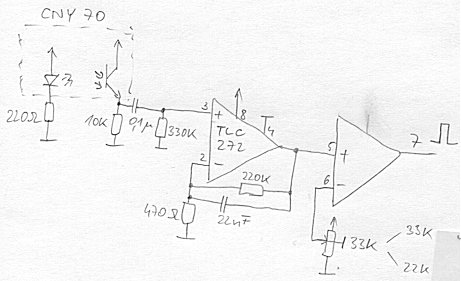
The trimmer can be removed and substituted by two resistors if you get problems with the pulses -> use the trimmer.
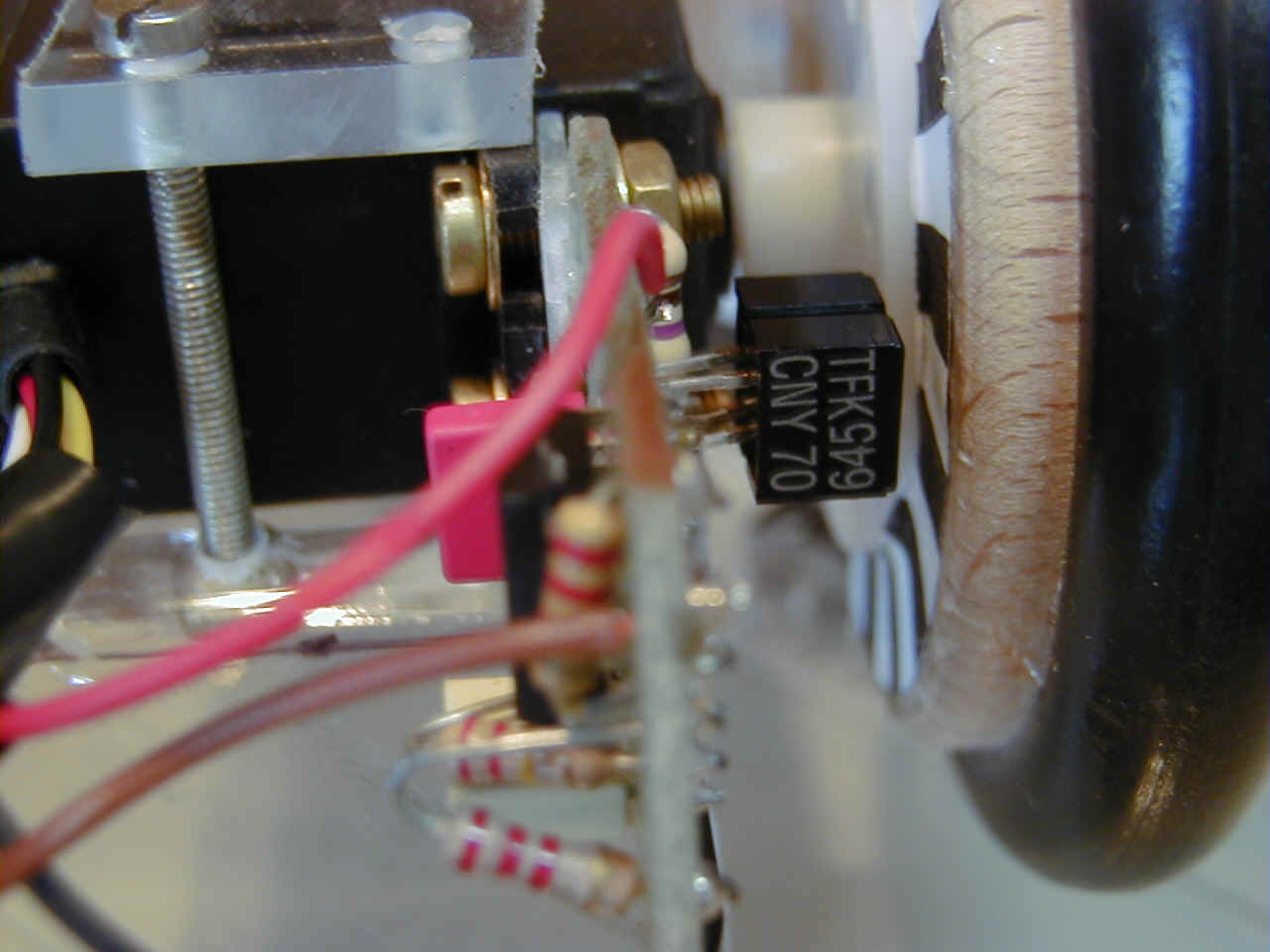
The reflex sensor can be bought from any electronic suplier around (bought it at conrad-electronic Munich)